All hooked up (and almost boxed up) What a mess!!!

All hooked up (easier to see each component)
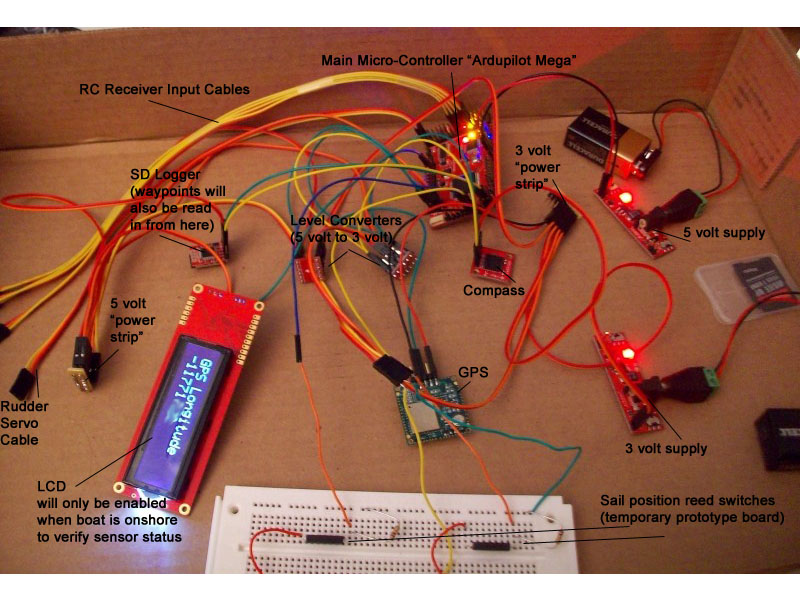
Control Panel Note this display would normally be powered off while sailing (via LCD toggle shown). It is just used to verify status of sensors, etc prior to launch. Various information is displayed and updates every few seconds. Green button pauses/resumes on currently displayed info.

Microcontroller

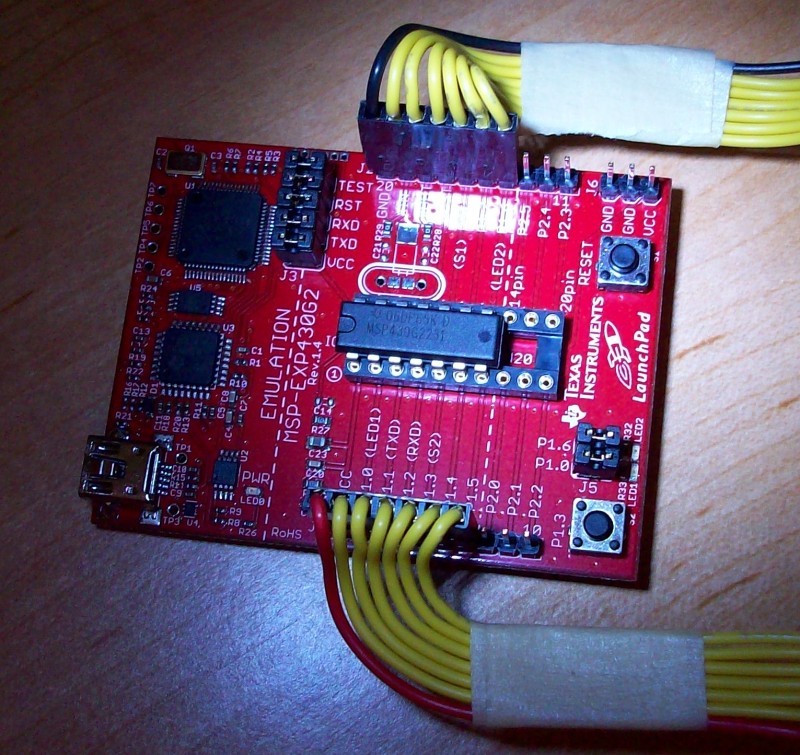
I've also been messing with a TI Launchpad for some tests. For example, I used it to test the automation of the camera power on/off, mode, and shutter. (see Camera/Video below for more info)
However, I ultimately decided to just run the cameras off the main ardupilot board since I had plenty of pins.
GPS

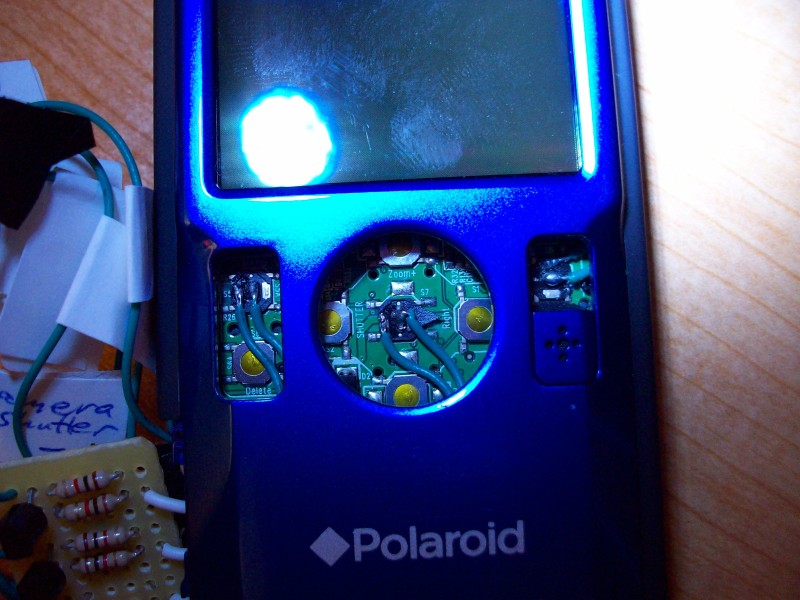
Camera/Video
 Click here to see a video demonstration of the camera automation
Click here to see a video demonstration of the camera automation

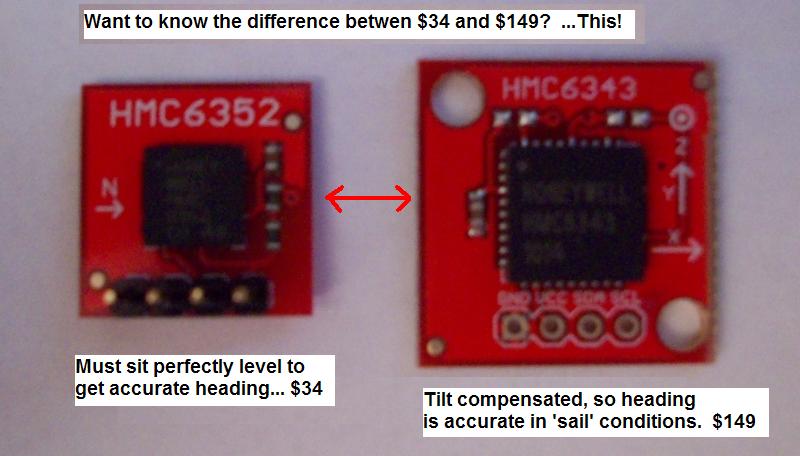
Heading Sensor (Boat)
I was originally planning to use this much cheaper sensor, but have since realized that it requires a perfectly level orientation to produce accurate/usable results.
Heading Sensor (Wind)
Rudder Servo
Click here to see the rudder servo in action (ignore the 2nd half of the video - it just shows the boat some more, but it's too dark to see much anyways!)
Sail Position Sensors Underneath the white silicon (Sugru) are 3 reed sensors wired up in parallel. Another set of sensors is located on the opposite side of the deck lid as well.
